- 網(wǎng)站首頁
-
-
-+
-
-
-+
-
-
-+
-
-
-+
-
-
-+






管道清淤機器人應用與實踐
發(fā)布日期:2022-09-26 09:00:24 瀏覽次數(shù):1226近年來隨著城市化的進程加快推進,城市排水管網(wǎng)基本建設逐漸拓展業(yè)務。近些年城市生活垃圾處理、工廠廢棄物及其建筑施工沙漿不斷增長,而傳統(tǒng)式城市管道系統(tǒng)欠缺綠化養(yǎng)護,造成排水管道淤阻問題凸顯、廢水外流,化工管路發(fā)生內(nèi)部結構損害等安全風險。排水設備被生動地比成城市根基,確保排水設備的正常運行,針對維護城市自然環(huán)境、操縱環(huán)境污染、提升群眾生活質(zhì)量、維護保養(yǎng)市容環(huán)境擁有重要作用。因而,為確保排水設備的正常運行,就必須要對排水管道定期進行輸通、清除。

現(xiàn)階段,中國普遍使用提升絞車清淤法及水力發(fā)電清淤法來排水管道管路清淤工作中。提升絞車清淤法必須人力穿纜,而管路艱苦環(huán)境,沼充溢氣,易燃性易中毒了,嚴重危害工作工人生命安全。孔徑比較小的管路大多采用水力發(fā)電清淤法,但選用高壓水槍清淤存有機器設備價格昂貴、需水量大一點的費用問題。

從而,排水管道管道機器人應時而生。管道機器人是一種可沿管路里外壁全自動走動、帶上一種或多個感應器及使用機械設備,在人員的遙控器實際操作或電子計算機自動控制系統(tǒng)下,開展一系列管路作業(yè)機、電、儀、一體化系統(tǒng)。
城市清淤應用案例—潭頭渠
潭頭渠坐落于深圳市龍崗區(qū)松崗街道,做為茅洲河一級支流深圳沙井河的干支流,從歸屬于珠江水系,全長4.38km。潭頭西街倒虹吸長679m,箱涵最少截面尺寸為4m x 2.5m,箱涵行為主體已改造成混凝土結構構造,部分段為漿砌石腋角加預制構件混凝土結構現(xiàn)澆板。因為上下游土壤侵蝕及工業(yè)生產(chǎn)工業(yè)廢水難題,河堤暗涵內(nèi)沉積比較嚴重,做為潮濕流域,人力清除僅可在主汛期工作,且管中伴隨有毒氣體,工程施工難度大。
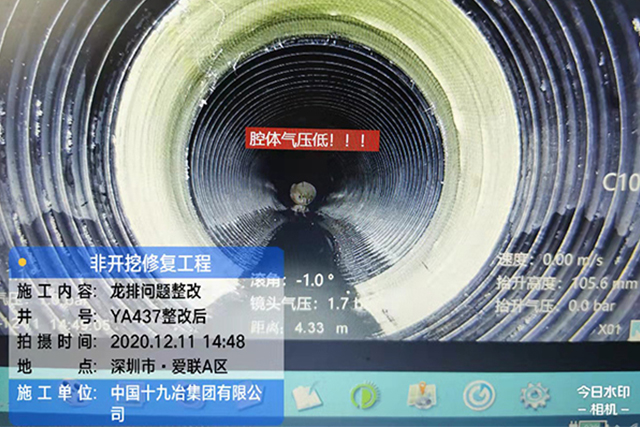
使用了履帶清淤機器人、污泥深度脫水干固車、抓斗清淤車等設施合作清淤。該機器人由排水管道、排泥設備、泥水分離系統(tǒng)軟件、視頻監(jiān)控系統(tǒng)和操控系統(tǒng)構成,根據(jù)地面控制工作人員無線控制完成箱涵里的清淤、走動。該機器人可以從水下工程,不用終斷箱涵正常的排水管道,在迅速、安全性、高效率的進行清淤工作過程中,更大化保證了操作人員的安全性,且降低了對周圍住戶環(huán)境中的日常生活、交通影響。資料顯示該自動化技術清淤法速率較傳統(tǒng)式清淤法提高2-3倍左右,無二次污染。
但是,自動化技術清淤價格昂貴,早期必須獨立開展暗涵內(nèi)地下管線探測核查,如出現(xiàn)受到影響管道,還要人力相互配合維護,一部分箱涵疊水處及箱涵半經(jīng)比較小的曲線段清淤存有盲區(qū),難以實現(xiàn)徹底清淤。機器設備身型還需減少,以進一步提高其適用范圍。
機器人檢驗、清淤的探索及應用提升了城市排水管網(wǎng)的清淤效率自動化程度,有效解決了傳統(tǒng)式清淤的安全隱患。此項目為以后暗涵清除發(fā)展的方向提供了借鑒。
技術難題與未來展望
在我國排水管道相比歐洲國家管經(jīng)比較小,且欠缺按時綠化養(yǎng)護,存有很多臟物沉積。目前排水管道管道機器人廣泛身型比較大,或走動方法的敏捷度稍低,不能在此類管道上正常的走動。腿足式管道機器人及仿生技術管道機器人能夠很好地處理這類問題,但世界各國現(xiàn)階段依然在開發(fā)階段,間距行業(yè)應用也有一段距離。除此之外,目前排水管道管道機器人大多為遙控器型機器人,不具有獨立走動檢驗、清淤水平,必須地面控制人員的全過程操縱,將來自動式智能化管道機器人將是研究方向。
現(xiàn)階段機器人的通訊方式大多采用電纜線式構造,無纜排水管道管道機器人不用電纜線液壓絞盤控制模塊,具有控制模塊協(xié)調(diào)能力高、便于攜帶等特點,但無線數(shù)據(jù)傳輸仍然存在高耗損、受金屬管道屏蔽掉危害等難題。
管道機器人以電磁能推動為主導,普遍使用帶上電瓶或者拖纜供電系統(tǒng)的形式,存有供電系統(tǒng)時間很短、負荷太重、不適合遠距離繁雜結構管道中行駛等難題。長久的供電模式,如帶上大空間輕形電瓶、太陽能發(fā)電站、液體自發(fā)電系統(tǒng)將是管道機器人動能提供發(fā)展的趨勢。
將來管道機器人可以從走動技術性、自動控制系統(tǒng)、無線傳輸技術、智能化圖像處理技術等板塊開展深耕細作,完成相對高度智能化,提升檢驗、清淤的質(zhì)量和效率,為推進城市排水管網(wǎng)自動化管理增添助力
- 上一篇:管道清淤大工程,告別煩雜難
- 下一篇:高壓清洗機在城市下水管道清淤中的應用